光学测距有多种方法,包括 TOF(飞行时间)方法和三角测距方法。它们用于各种用途,例如在自动驾驶汽车中检测周围环境,以及用于机器人和激光测距仪中检测障碍物。滨松为这些测距机理提供各种光电传感器和发光体。并提供符合此类要求的定制规格传感器。
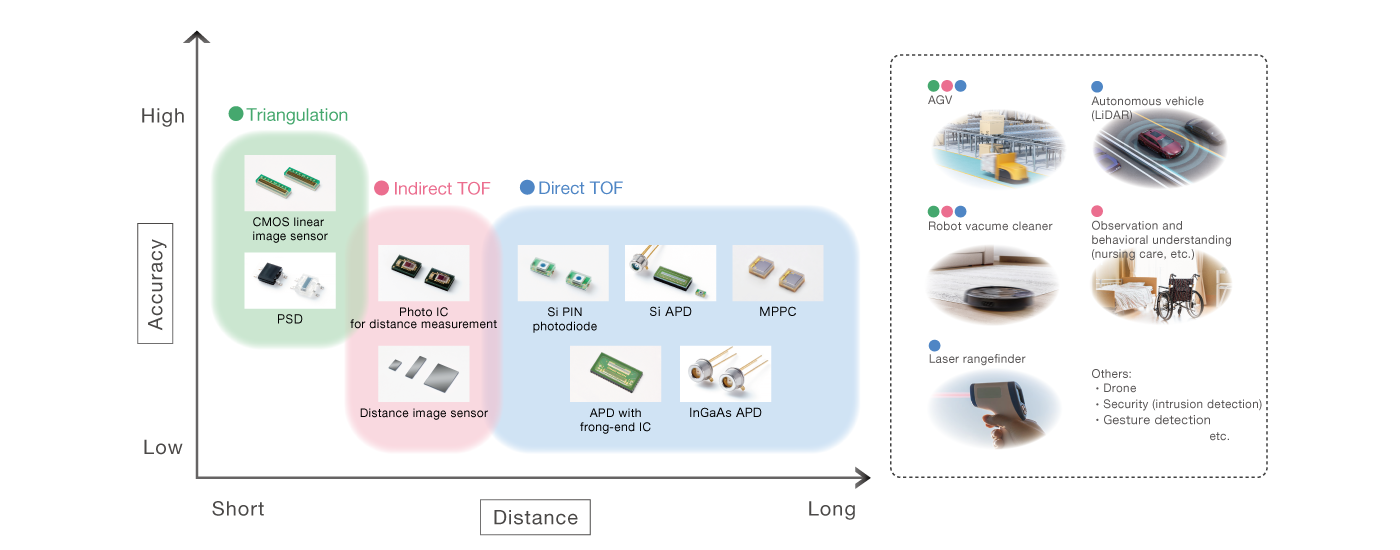
LiDAR(激光雷达)是一种遥感技术,通过将激光照射到物体上、然后用光电传感器捕捉反射回来的光来测量距离。近年来,在实现全自动驾驶汽车方面取得了巨大进展。LiDAR 具有高方位角分辨率,可以高精度找到周围车辆、行人、建筑物和其他物体的距离、形状和相对位置。这项技术在各种用途中的潜力引起了关注,包括 ADAS(高级驾驶辅助系统)和 AGV(自动导引车)。
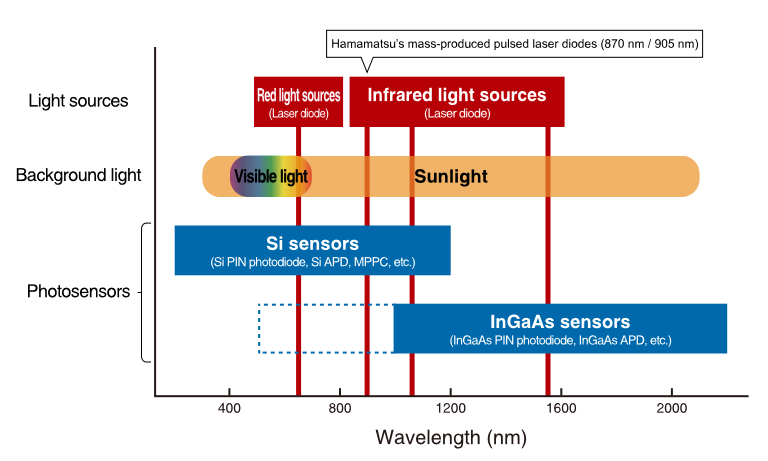
滨松为 LiDAR 提供各种设备,包括作为光源的脉冲激光二极管,以及作为光电传感器的硅 APD、InGaAs APD 和多像素光子计数器。
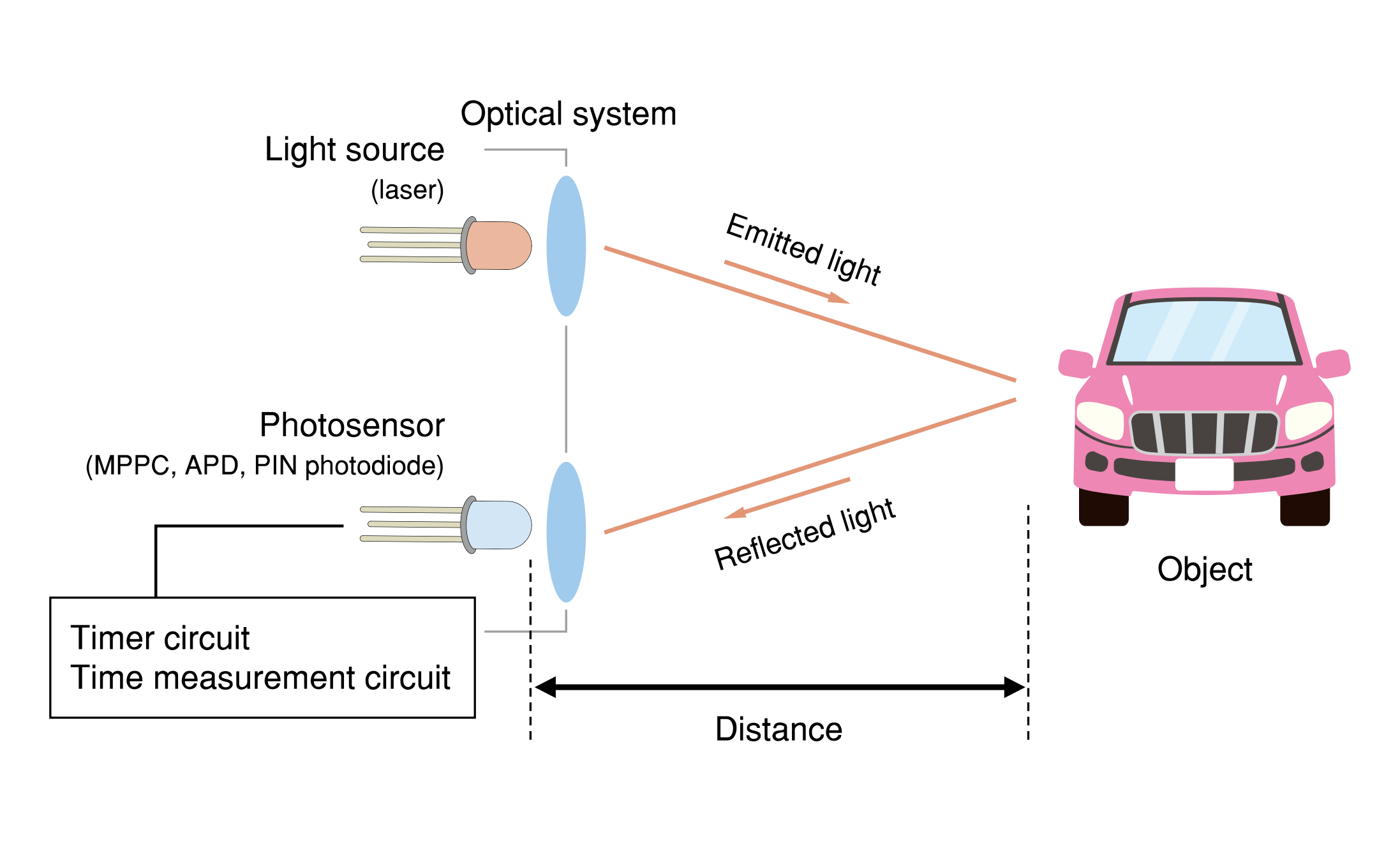
LiDAR 的机理
汽车用 LiDAR 主要采用直接 TOF 方法。此方法通过计算脉冲光从其光源行进、从物体反射并返回到传感器的时间长度来计算距离。
光源/光电传感器与波长之间的关系
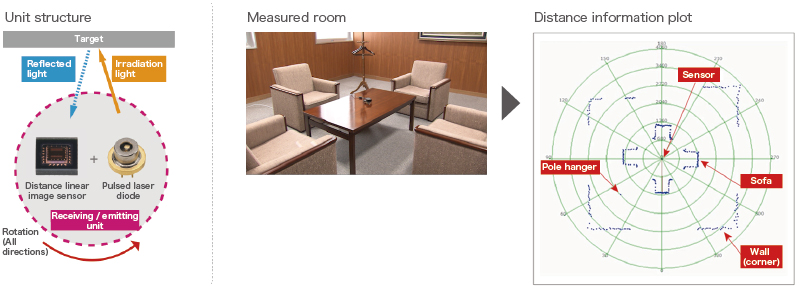
扫地机器人通过测量墙壁和家具的位置以及与周围障碍物的距离来自动移动。为了进行此测量,它应用 TOF(飞行时间)和光三角测量的原理。在发光体装置中采用了激光二极管或 LED,并在光电传感器中采用了图像传感器或光 IC。
测量示例(测距图像传感器)
它通过转动一个内置了测距线阵图像传感器和激光器的单元,对房间进行全向测距。